xxxxxxxxxxbegin using Pkg Pkg.activate(mktempdir()) Pkg.add(["PyPlot","PlutoUI","Triangulate"]) using Triangulate using PlutoUI using PyPlot ENV["LC_NUMERIC"]="C" # prevent pyplot from essing up string2float conversion PyPlot.svg(true) using PrintfendMesh generation
Regard boundary value problems for PDEs in a finite domain
Solution spaces for PDEs are infinite dimensional
One way of defining such approximations is based on the subdivision of
Elementary shapes:
triangles or quadrilaterals (
tetrahedra or cuboids (
more general cases possible
During this course:
Assume the domain is polygonal, its boundary
Focus on simplexes (triangles, tetrahedra)
Geometrically most flexible
Starting point for more general methods
Focus on
Admissible grids
Definiton: A grid
If
If for
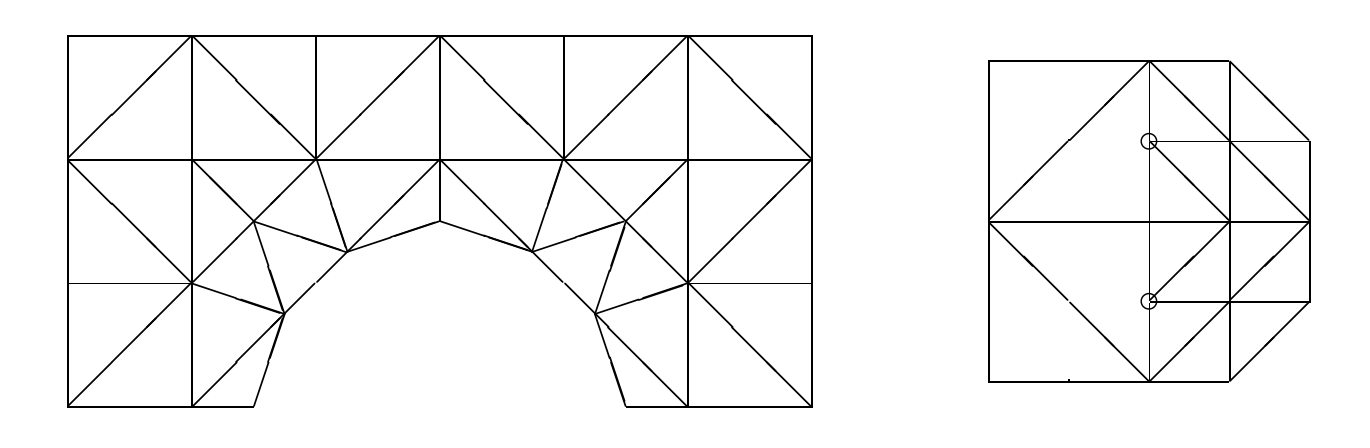
Image (Source: Braess): Left - admissible mesh, right - mesh with "hanging" nodes
There are generalizations of finite element and finite volume methods which can work with hanging nodes, however we will not go into these details in the course.
Voronoi diagram
After G. F. Voronoi, 1868-1908
Definition: Let
Definition: Given a finite set of points
The Voronoi diagram of
The Voronoi diagram subdivides the whole space into ``nearest neigbor'' regions
Being intersections of half planes, the Voronoi regions are convex sets
xxxxxxxxxxpts=[0 0; 0.5 1;# 0.6 0.6;# 0.1 0.1;# 0.1 0.7; 1 0];
Delaunay triangulation
After B.N. Delaunay (Delone), 1890-1980
Given a finite set of points
Assume that the points of
Connect each pair of points whose Voronoi regions share a common edge with a line
xxxxxxxxxxpoints=[0 0; 0.5 0.5;# 0.5 -0.1;# 0.5 0.1; 1 0;]; 
Another Interactive example via GEOGRAM. This smoothes the point set after insertion, but you get a good impression about the Duality between Voronoi and Delaunay.
The circumsphere (circumcircle in 2D) of a
The circumball (circumdisc in 2D) of a simplex is the unique (open) ball which has the circumsphere of the simplex as boundary
Definition: A triangulation of the convex hull of a point set
The Delaunay triangulation of a point set
Otherwise there is an ambiguity - if e.g. 4 points are one circle, there are two ways to connect them resulting in Delaunay triangles
Edge flips and locally Delaunay edges (2D only)
For any two triangles
An edge of a triangulation is locally Delaunay if it either belongs to exactly one triangle, or if it belongs to two triangles, and their respective circumdisks do not contain the points opposite wrt. the edge
If an edge is locally Delaunay and belongs to two triangles, the sum of the angles opposite to this edge is less or equal to
If all edges of a triangulation of the convex hull of
If an edge is not locally Delaunay and belongs to two triangles, the edge emerging from the corresponding edge flip will be locally Delaunay
Flip edge to make the triangles Delaunay:

Lawson's Edge flip algorithm for constructing a Delaunay triangulation
This is one of the most elementary mesh generation algorithms
Input: A stack
While
pop an edge
If
Flip
Push edges
This algorithm is known to terminate after
Among all triangulations of a finite point set
The set of all possible triangulations of
Randomized incremental flip algorithm (2D only)
Create Delaunay triangulation of point set
Estimated complexity:
In 3D, there is no simple flip algorithm, generalizations are active research subject
Triangle
During this course, we will focus on Triangle. It can be compiled to a standalone executable reading and writing files or to a library which can be called from applications.
In Julia it is accessible via the package Triangulate.jl.
The following examples have been taken from that package and slightly modified for Pluto.
General use
Triangle communicates via a data structure
TriangulateIOwhich contains possible input and output informationIt processes an input structure and returns on output the triangulation, and possibly, the Voronoi diagram.
It is controlled via a string containing switches
The switch '-Q' makes Triangle quiet
Delaunay triangulation of the convex hull of a pointset
Create a set of random points in the plane and calculate the Delaunay triangulation of this set of points. It is a triangulation where for each triangle, the interior of its circumcircle does not contain any points of the trianglation.
The Delaunay triangulation of a set of points in general position (no 4 of them on a circle) is unique. At the same time, it is a triangulation of the convex hull of these points.
Given an input list of points, without any further flags, Triangle creates just this triangulation (the "Q" flag suppresses the text output of Triangle). For this and the next examples, the input list of points is created randomly, but on a raster, preventing the appearance of too close points.
example_convex_hull (generic function with 1 method)xxxxxxxxxxfunction example_convex_hull(;n=10) triin=TriangulateIO() triin.pointlist=rand(Cdouble,2,n) (triout, vorout)=triangulate("Q", triin) triin,trioutendTriangulateIO( pointlist=[0.729408 0.268405 … 0.0471536 0.670108; 0.0860627 0.19834 … 0.203296 0.234648], )
TriangulateIO( pointlist=[0.729408 0.268405 … 0.0471536 0.670108; 0.0860627 0.19834 … 0.203296 0.234648], pointmarkerlist=Int32[1, 0, 0, 1, 0, 1, 0, 1, 1, 0], trianglelist=Int32[9 2 … 6 4; 2 9 … 7 7; 5 1 … 4 10], )
xxxxxxxxxxtriin,triout=example_convex_hull(n=10)
Delaunay triangulation of point set with boundary
Same as the previous example, but in addition specify the "c" flag In this case, Triangle outputs an additional list of segments describing the boundary of the convex hull. In fact this is a constrained Delaunay triangulation (CDT) where the boundary segments are the constraining edges which must appear in the output.
example_convex_hull_with_boundary (generic function with 1 method)xxxxxxxxxxfunction example_convex_hull_with_boundary(;n=10) triin=TriangulateIO() triin.pointlist=rand(Cdouble,2,n) triout, vorout=triangulate("cQ", triin) triin,trioutendTriangulateIO( pointlist=[0.285658 0.246788 … 0.174594 0.806665; 0.359657 0.772696 … 0.743857 0.234212], )
TriangulateIO( pointlist=[0.285658 0.246788 … 0.174594 0.806665; 0.359657 0.772696 … 0.743857 0.234212], pointmarkerlist=Int32[1, 1, 1, 1, 1], trianglelist=Int32[4 2 1; 3 1 2; 2 5 3], segmentlist=Int32[3 1 … 2 4; 4 3 … 5 2], segmentmarkerlist=Int32[1, 1, 1, 1, 1], )
xxxxxxxxxxexample_convex_hull_with_boundary(n=5)
xxxxxxxxxxplot_in_out(PyPlot,example_convex_hull_with_boundary(n=20)...);gcf()Delaunay triangulation of point set with Voronoi diagram
Same as the previous example, but instead of "c" specify the "v" flag In this case, Triangle outputs information about the Voronoi diagram of the point set which is a structure dual to the Delaunay triangulation.
The Voronoi cell around a point
The Voronoi cells of boundary points of the convex hull are of infinite size. The corners of the Voronoi cells are the circumcenters of the triangles. They can be far outside of the triangulated domain.
example_convex_hull_voronoi (generic function with 1 method)xxxxxxxxxxfunction example_convex_hull_voronoi(;points=rand(Cdouble,2,10),show_tria=true,circumcircles=false) triin=Triangulate.TriangulateIO() triin.pointlist=points (triout, vorout)=triangulate("vQ", triin) if !show_tria triout.trianglelist=zeros(Cint,2,0) end plot_in_out(PyPlot,triin,triout,voronoi=vorout,circumcircles=circumcircles) gcf().set_size_inches(8,4) gcf()end
xxxxxxxxxxexample_convex_hull_voronoi(points=rand(Cdouble,2,10),circumcircles=true)Boundary conforming Delaunay triangulation of point set
Specify "c" flag for convex hull segments, "v" flag for Voronoi and "D" flag for creating a boundary conforming Delaunay triangulation of the point set. In this case additional points are created which split the boundary segments and ensure that all triangle circumcenters lie within the convex hull. Due to random input, there may be situations where Triangle fails with this task, so we check for the corresponding exception.
example_convex_hull_voronoi_delaunay (generic function with 1 method)xxxxxxxxxxfunction example_convex_hull_voronoi_delaunay(;n=10,circumcircles=false) triin=Triangulate.TriangulateIO() triin.pointlist=rand(Cdouble,2,n) (triout, vorout)=triangulate("vcDQ", triin) plot_in_out(PyPlot,triin,triout,voronoi=vorout,circumcircles=circumcircles)end
xxxxxxxxxxexample_convex_hull_voronoi_delaunay(;n=5,circumcircles=true);gcf()Constrained Delaunay triangulation (CDT) of a domain given by a segment list specifying its boundary.
Constrained Delaunay triangulation (CDT) of a point set with additional constraints given a priori. This is obtained when specifying the "p" flag and an additional list of segments each described by two points which should become edges of the triangulation. Note that the resulting triangulation is not Delaunay in the sense given above.
example_domain_cdt (generic function with 1 method)xxxxxxxxxxfunction example_domain_cdt(;Plotter=nothing) triin=Triangulate.TriangulateIO() triin.pointlist=Cdouble[0.0 0.0 ; 1.0 0.0 ; 1.0 1.0 ; 0.8 0.6; 0.0 1.0]' triin.segmentlist=Cint[1 2 ; 2 3 ; 3 4 ; 4 5 ; 5 1 ]' triin.segmentmarkerlist=Cint[1, 2, 3, 4, 5] (triout, vorout)=triangulate("pQ", triin) plot_in_out(PyPlot,triin,triout;voronoi=vorout)end
xxxxxxxxxxexample_domain_cdt();gcf()Constrained Delaunay triangulation (CDT) of a domain given by a segment list specifying its boundary together with a maximum area constraint.
This constraint is specfied as a floating point number given after the -a flag. Be careful to not give it in the exponential format as Triangle would be unable to analyse it. Therefore it is dangerous to give a number in the string interpolation and it is better to convert it to a string before using @sprintf. Specifying only the maximum area constraint does not prevent very thin triangles from occuring at the boundary.
example_domain_cdt_area (generic function with 1 method)xxxxxxxxxxfunction example_domain_cdt_area(;maxarea=0.05,circumcircles=false) triin=Triangulate.TriangulateIO() triin.pointlist=Cdouble[0.0 0.0 ; 1.0 0.0 ; 1.0 1.0 ; 0.8 0.6; 0.0 1.0]' triin.segmentlist=Cint[1 2 ; 2 3 ; 3 4 ; 4 5 ; 5 1 ]' triin.segmentmarkerlist=Cint[1, 2, 3, 4, 5] area=("%.15f",maxarea) # Don't use exponential format! (triout, vorout)=triangulate("pa$(area)Q", triin) plot_in_out(PyPlot,triin,triout,voronoi=vorout,circumcircles=circumcircles)end
xxxxxxxxxxexample_domain_cdt_area(maxarea=0.05,circumcircles=false);gcf()Boundary conforming Delaunay triangulation (BCDT) of a domain given by a segment list specifying its boundary
In addition to the area constraint specify the -D flag in order to keep the triangle circumcenters within the domain.
example_domain_bcdt_area (generic function with 1 method)xxxxxxxxxxfunction example_domain_bcdt_area(;maxarea=0.05,circumcircles=false) triin=Triangulate.TriangulateIO() triin.pointlist=Cdouble[0.0 0.0 ; 1.0 0.0 ; 1.0 1.0 ; 0.8 0.6; 0.0 1.0]' triin.segmentlist=Cint[1 2 ; 2 3 ; 3 4 ; 4 5 ; 5 1 ]' triin.segmentmarkerlist=Cint[1, 2, 3, 4, 5] area=("%.15f",maxarea) (triout, vorout)=triangulate("pa$(area)DQ", triin) plot_in_out(PyPlot,triin,triout,voronoi=vorout,circumcircles=circumcircles)end
xxxxxxxxxxexample_domain_bcdt_area(maxarea=0.01,circumcircles=true);gcf()Triangulation of a domain with refinement callback
A maximum area constraint is specified in the unsuitable callback which is activated via the "u" flag if it has been passed before calling triangulate. In addition, the "q" flag allows to specify a minimum angle constraint preventing skinny triangles.
example_domain_localref (generic function with 1 method)xxxxxxxxxxfunction example_domain_localref(;minangle=20) center_x=0.8 center_y=0.6 localdist=0.1 function unsuitable(x1,y1,x2,y2,x3,y3,area) bary_x=(x1+x2+x3)/3.0 bary_y=(y1+y2+y3)/3.0 dx=bary_x-center_x dy=bary_y-center_y qdist=dx^2+dy^2 qdist>1.0e-5 && area>0.1*qdist end triin=Triangulate.TriangulateIO() triin.pointlist=Cdouble[0.0 0.0 ; 1.0 0.0 ; 1.0 1.0 ;center_x center_y; 0.0 1.0]' triin.segmentlist=Cint[1 2 ; 2 3 ; 3 4 ; 4 5 ; 5 1 ]' triin.segmentmarkerlist=Cint[1, 2, 3, 4, 5] triunsuitable(unsuitable) angle=("%.15f",minangle) (triout, vorout)=triangulate("pauq$(angle)Q", triin) plot_in_out(PyPlot,triin,triout,voronoi=vorout)end
xxxxxxxxxxexample_domain_localref();gcf()Triangulation of a heterogeneous domain
The segment list specifies its boundary and the inner boundary between subdomains. An additional region list is specified which provides "region points" in regionlist[1,:] and regionlist[2,:]. These kind of mark the subdomains. regionlist[3,:] contains an attribute which labels the subdomains. regionlist[4,:] contains a maximum area value. size(regionlist,2) is the number of regions.
With the "A" flag, the subdomain labels are spread to all triangles in the corresponding subdomains, becoming available in triangleattributelist[1,:]. With the "a" flag, the area constraints are applied in the corresponding subdomains.
example_domain_regions (generic function with 1 method)xxxxxxxxxxfunction example_domain_regions(;minangle=20) triin=Triangulate.TriangulateIO() triin.pointlist=Cdouble[0.0 0.0 ;0.5 0.0; 1.0 0.0 ; 1.0 1.0 ; 0.8 0.6; 0.0 1.0]' triin.segmentlist=Cint[1 2 ; 2 3 ; 3 4 ; 4 5 ; 5 6 ; 6 1 ; 2 5]' triin.segmentmarkerlist=Cint[1, 2, 3, 4, 5, 6, 7] angle=("%.15f",minangle) triin.regionlist=Cdouble[0.2 0.2 1 0.05; 0.8 0.2 2 0.001]' (triout, vorout)=triangulate("paAq$(angle)Q", triin) plot_in_out(PyPlot,triin,triout,voronoi=vorout)end
xxxxxxxxxxexample_domain_regions();gcf()